

Technical
Information
Why use hydrofoils ?
In 1962 in England, a catamaran using hydrofoils sailed
for the first time on the surface of the water, but not for long. Without
any type of control over the hydrofoils, the effort was doomed to fail. Sailing
on hydrofoils with just the help of the wind is quite spectacular, but definitely
not easy. Worldwide, more and more sailors, especially those sailing catamarans,
are turning to hydrofoil technology. It's worth mentioning the success of
the international "Moth" Class, the first regatta category to sail on hydrofoils,
as well as the spectacular world speed record of 100 km/h set by the French
"Hydroptère" in 2011.
The real challenge is to be able to control the "altitude" i.e. distance of
the boat above the water, regardless of the conditions. This distance should
always be the same: when the wind suddenly gusts and dies down again, when
high side forces are acting whilst beating, when the boat pitches whilst running
- all of that, no matter how rough the waves are.
In recent years, this problem has been solved by placing flaps at the back edge of each hydrofoil (Hook method). The flaps can be adjusted using mechanical controls (see Fig. 1), thereby increasing the lift as required. This works quite well when the water is relatively calm, but stops working when the water gets rougher, as the flaps tend to start fluttering. Also, with this system, only lift can be controlled, but not downforce (negative lift). Download Fig.1 (PDF) Mechanical hydrofoil control (Hook method) |
|
|
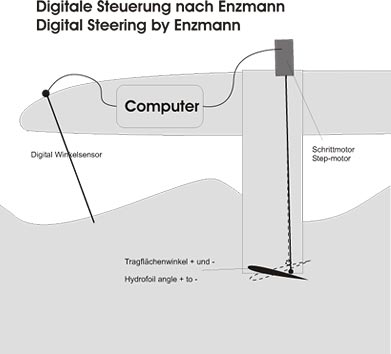
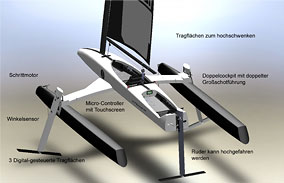
| Digital
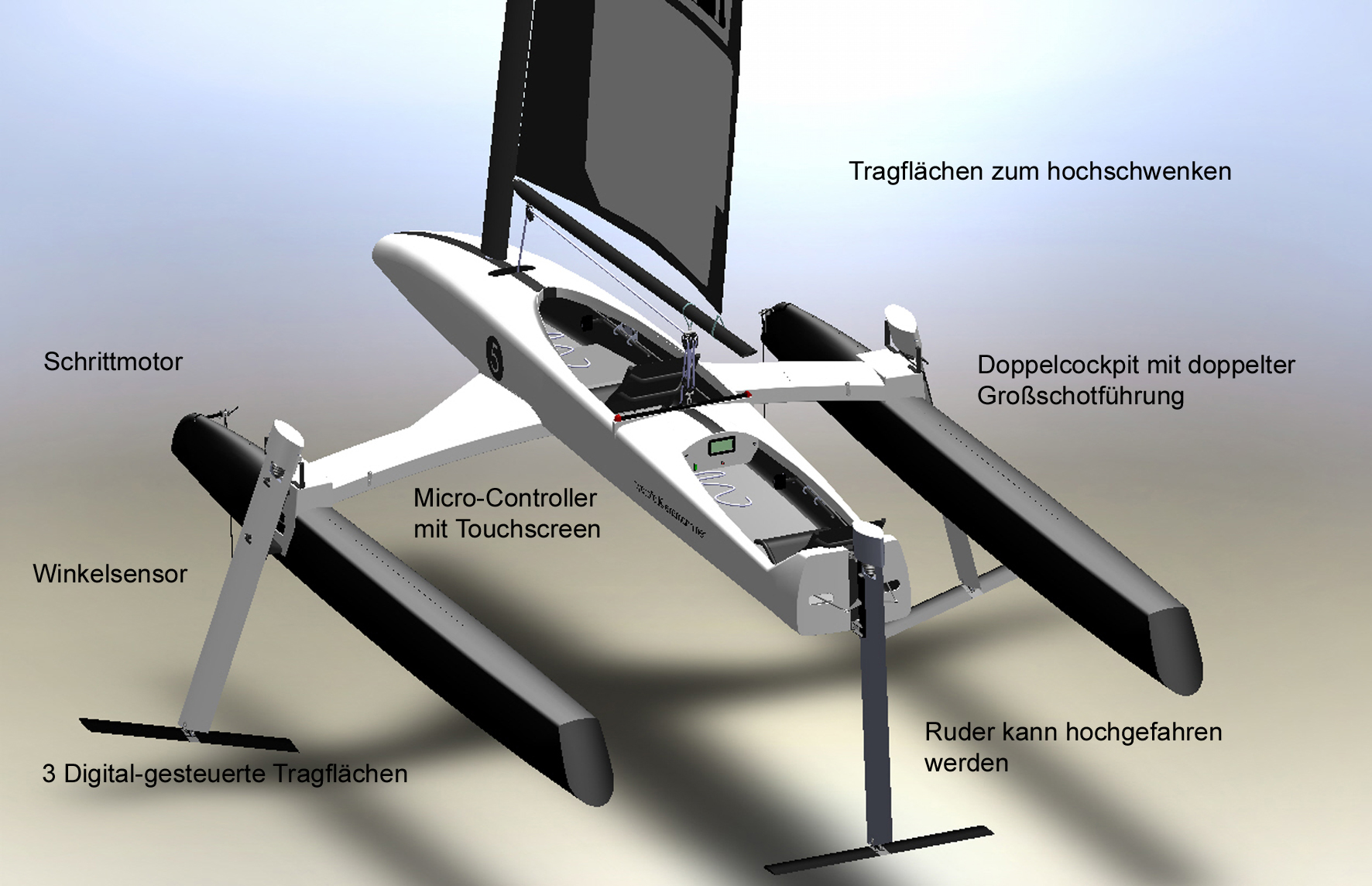
hydrofoil control:*) Catlift, a Munich-based company, has been building hydrofoil control systems for the past 20 years. The company has developed an elegant solution which uses a computer to automatically control the complete hydrofoil, as opposed to just controlling flaps on the hydrofoil (Hook method). The computer controls powerful and responsive stepper motors which raise and lower the complete hydrofoil (Fig. 2). The efficiency of this type of hydrofoil is much higher, as only minor hydrofoil control movements are required. Also, by controlling the hydrofoils in this way, the computer can filter out the movements caused by the waves. The result is impressive: the new hydrofoiler F1 flys much faster than any comparable catamaran, yet with no sacrifice of safety, comfort and ease of use. Download Fig.2 (PDF) Digitally controlled hydrofoil |
|
|
Altitude control
In the new
hydrofoiler F1 the altitude (distance above the water's
surface) is controlled using a rod with an integrated angle sensor. The sensor
transmits the current distance to the computer. Using custom software* developed
by Christian Enzmann, the computer filters out the motion caused by the waves
and sends the required control signal to the stepper motor of the hydrofoil
control system to stabilise the boat.
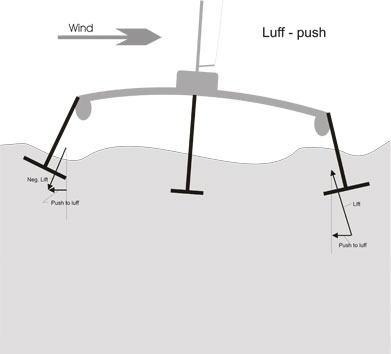
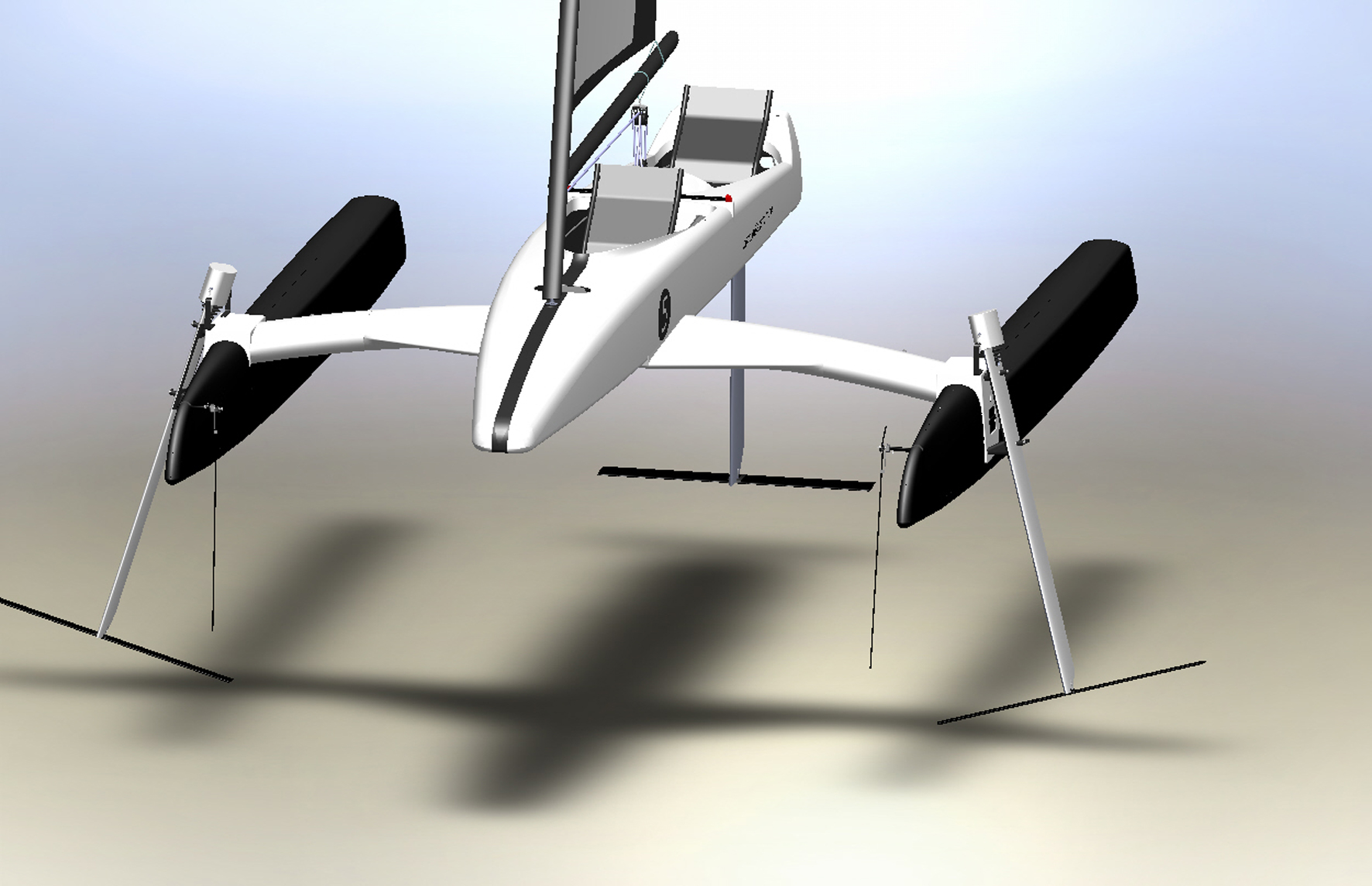
| The "luff push" effect
Both side daggerboards with the controllable hydrofoil on the bottom end (so-called T-foils) are not actually vertical, but are splayed out sidewards. In this way, not only does the leeward hydrofoil get the required lift to reach the right altitude, but also experiences a force toward the windward side, thereby reducing the windward drift by more than 50% (the "luff push" effect). As the altitude increases, the windward hydrofoil is automatically tilted downdard, thereby producing downforce. The consequence of this is, whilst the boat is close-hauling to the wind, a substantial amount of righting moment is available (in relation to the weight of the boat, more than with any other technology). By setting the windward hydrofoil at a negative incidence, besides the expected downforce pointing vertically down, there is also a downforce pointing in the windward direction. For the "Enzmann-hydro", this means that despite the higher speed, there is less drift experienced whilst beating to windward. Download Fig.3 (PDF) The "luff-push" effect |
|
|
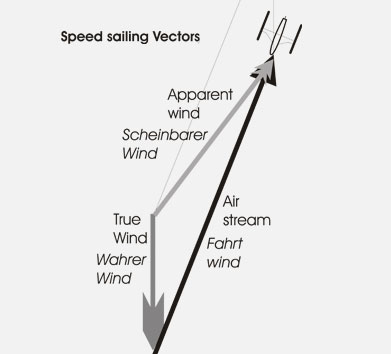
| Sailing faster than the
wind As with ice yachting, flying on hydrofoils means the boat is sailing faster by using its own headwind. Here's how it works: as the speed of the boat increases, so too does the headwind. This headwind vector is added to the true wind vector, thereby turning the "apparent" wind around so that it is like a fast wind coming diagonally from the front. It's this apparent wind which can drive the boat faster, as long as the drag force of the water can be reduced by sailing on hydrofoils. Download Fig.4 (PDF) Sailing using the headwind |
|
|
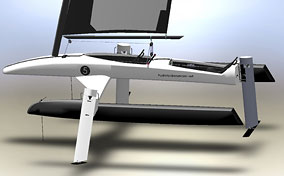
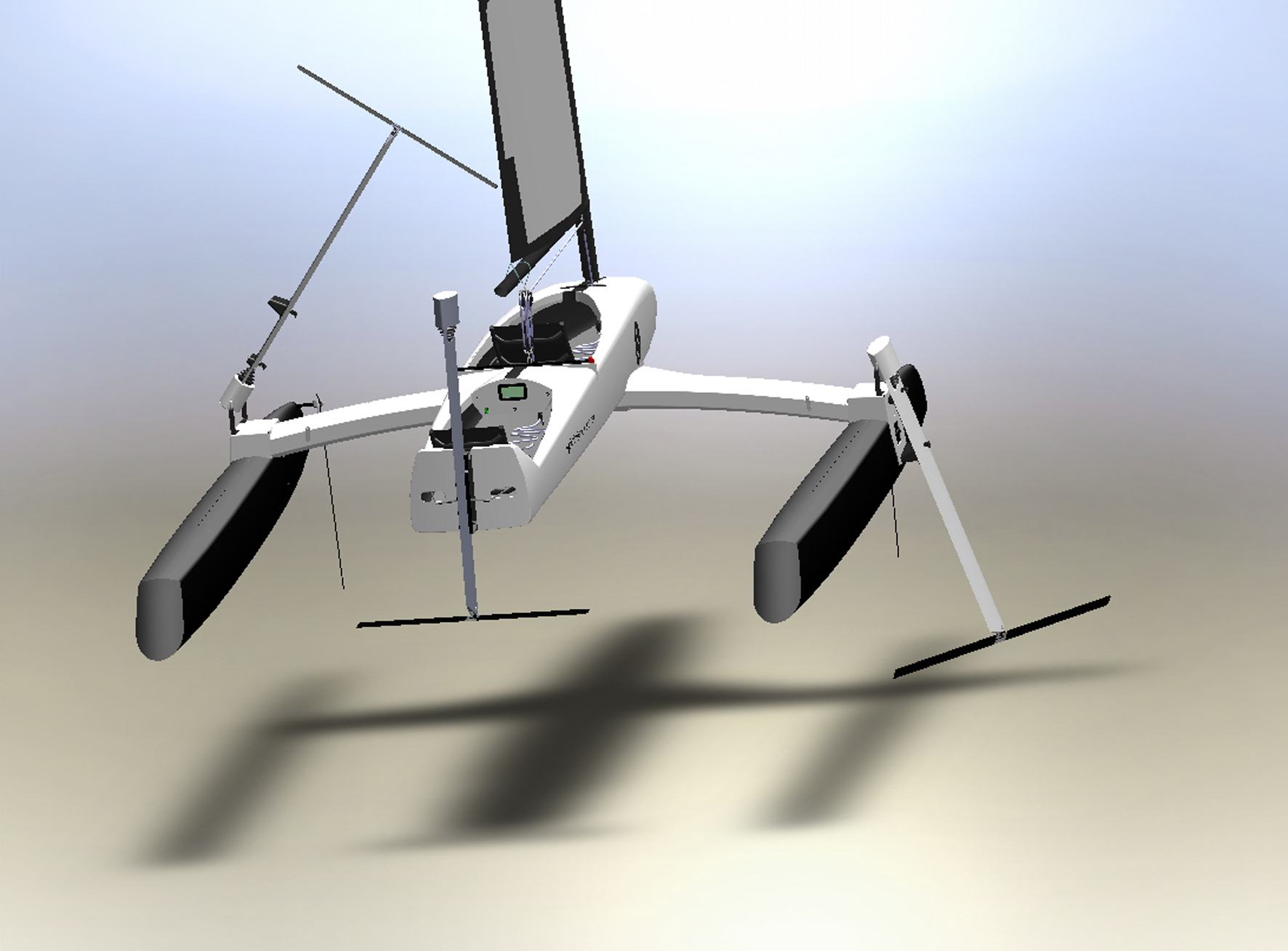
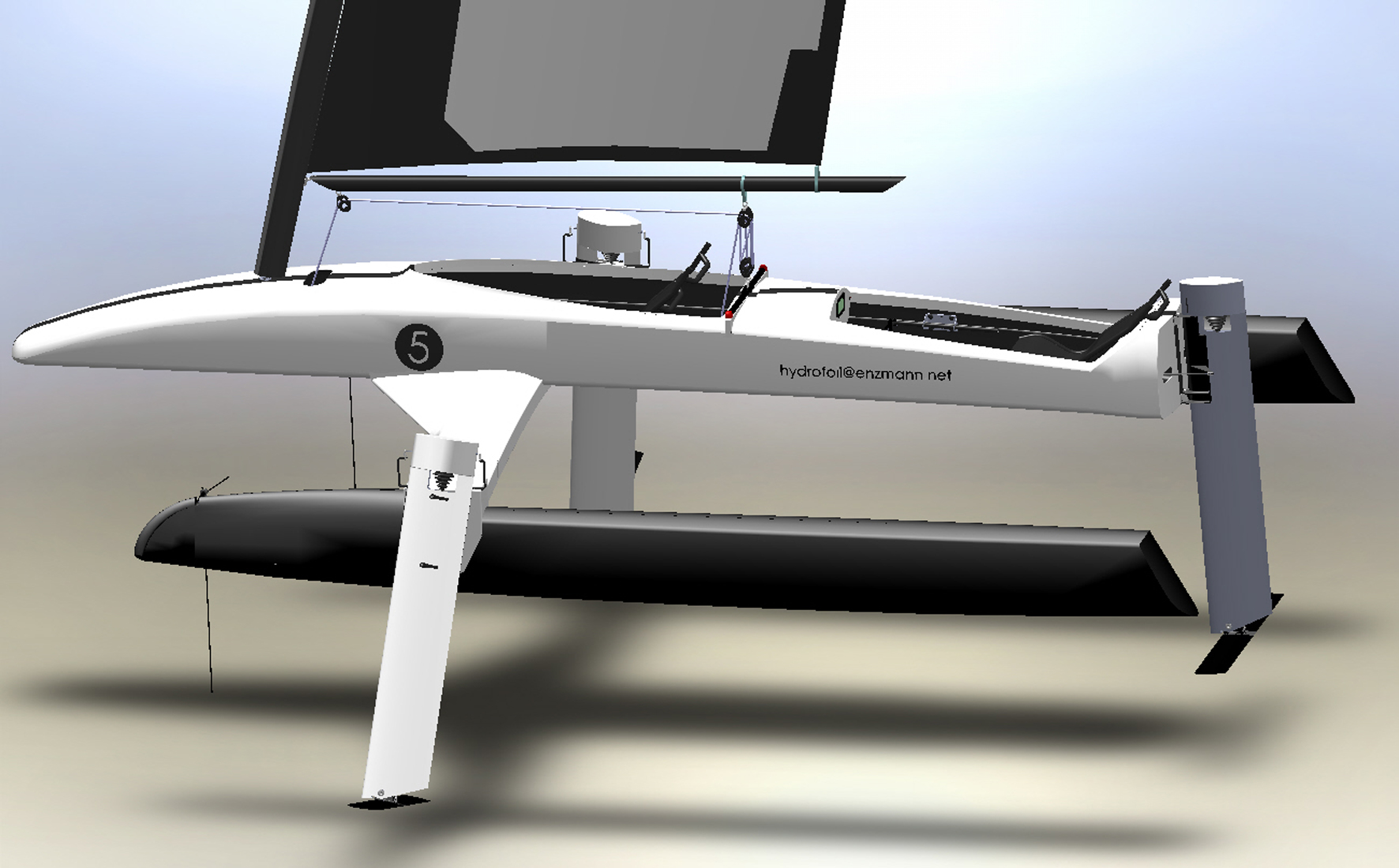
| Aerodynamic drag Every cyclist knows that a headwind uses up a lot of energy! With this in mind, a lot of work has gone into making the hydrofoiler F1 aerodynamic as possible for wind speeds of 100 km/h or higher. All parts of the boat were painstakingly designed and tested to minimise aerodynamic drag. Not only does this work really well, it also looks great. You can "see" the aerodynamic nature of the boat. Download Picture (300dpi) |
|
|
| The duo cockpit You can sail alone in the hydrofoiler F1 or with another person on board. All instrumentation required to "fly" is in the dashboard of the rear cockpit. Behind the rear cockpit, there is a drawer which contains the computer and the lithium ion rechargeable battery. The battery and the battery charger are standard off-the-shelf models which are also used for e-bikes. Aerodynamic made from carbon epoxy sandwich structure, white outside
Download Picture (300dpi) |
|
For charging, and to deter thieves, or the complete dashboard including computer and battery can be removed from the boat. |
|
Steering the boat |
|
|
The required water depth ? |
|
|
Under water, the hydrofoils are controlled using push-rods
which are in turn driven by stepper motors with their own controller.
Over a CAN-Bus data-network, all three motors are connected to each
other and to the central computer. |
|
|
The rigging |
|
*) Patents pend. Reg. Design Reg. Trademark
© Catlift GmbH & Co. Entwicklungs KG 2012 - Alle Rechte vorbehalten. Impressum. Webdesign by waytohere.com

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}